Screenshots auf Englisch
Die Benutzeroberfläche von IPAnalyzer ist derzeit nur auf Englisch und Japanisch lokalisiert. Die Screenshots auf dieser Seite werden daher auf Englisch angezeigt, auch wenn der Text übersetzt ist.
Anhang A1. Detektorgeometrie und Koordinatentransformationen¶
Diese Seite definiert mit Gleichungen das Koordinatensystem, die IP-Verkippungskorrektur und die Pixelform-Korrektur, die IPAnalyzer verwendet, um Pixelpositionen auf einem flachen Detektor (IP, CCD/CMOS) auf Beugungswinkel abzubilden. Für einen Überblick über das Koordinatensystem siehe auch die Übersichtsseite des Anhangs und 0. Überblick.
Koordinatensystem und Parameter¶
IPAnalyzer verwendet intern durchgängig ein rechtshändiges Koordinatensystem.
- Der Punkt, an dem der Röntgen- oder Elektronenstrahl die IP durchstößt (der direkte Spot), wird als Ursprung \((0,0,0)\) gewählt, und die \(Z\)-Achse ist mit der Ausbreitungsrichtung des Strahls ausgerichtet.
- Wird die Probe als infinitesimal klein behandelt, so wird der Abstand zwischen Probe und Ursprung als Kameralänge \(\mathrm{CL}\) definiert. Die Probenposition ist daher \((0,\ 0,\ -\mathrm{CL})\).
- Die \(X\)-Achse ist bei nicht verkippter IP mit der Scanrichtung des Auslese-Lasers ausgerichtet (die Richtung nach rechts im Bild). Die \(Y\)-Achse zeigt daher auf dem Bildschirm nach unten.
- Ein Beugungsring mit Kegelwinkel \(2\theta\) wird auf einer unverkippten \(XY\)-Ebene als perfekter Kreis mit Radius \(\mathrm{CL}\tan 2\theta\) beobachtet.
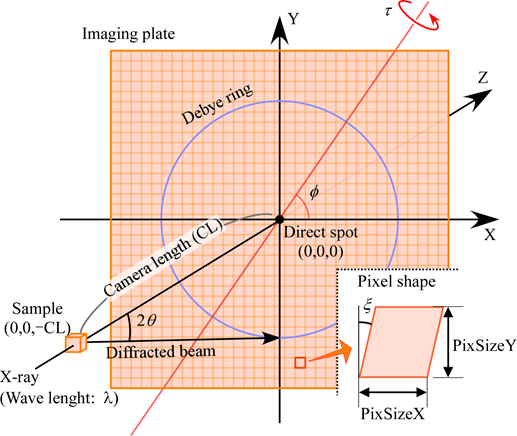
Die freie Rotation eines 3D-Objekts erfordert grundsätzlich drei Achsen, doch da die Verteilung des Debye-Rings unter Rotation um die \(Z\)-Achse invariant ist, kann die \(X\)-Achse beliebig gewählt werden. Dies entfernt einen Freiheitsgrad, sodass die IP-Verkippung mit zwei Variablen \(\varphi,\ \tau\) ausgedrückt werden kann.
Korrespondenz mit (WIN)PIP
Die Altsoftware PIP drückt die Verkippung mit einem anderen Winkelpaar \((\beta,\ \Phi)\) aus. Die Umrechnung von \((\beta,\ \Phi)\) in IPAnalyzers \((\varphi,\ \tau)\) lautet \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\). Einzelheiten siehe „Beziehung zu (WIN)PIP" in 0. Überblick.
IP-Verkippungskorrektur¶
Die Verkippung der IP gegenüber der optischen Achse (der \(Z\)-Achse) wird durch eine Rotation dargestellt, deren Achse eine Gerade ist, die durch den Ursprung verläuft und in der \(XY\)-Ebene liegt. Diese Rotation lässt sich als Rotationsmatrix \(R = R_2\,R_1\,R_2^{-1}\) schreiben, eine Operation, die um \(\tau\) entlang (\(R_1\)) einer Achse rotiert, die zuvor um \(\varphi\) um die \(Z\)-Achse gedreht wurde (\(R_2\)).
Dies ist äquivalent zu einer Rotation um den Winkel \(\tau\) um den Einheitsvektor \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\), der mit der \(X\)-Achse in der \(XY\)-Ebene den Winkel \(\varphi\) bildet, und das Ausmultiplizieren liefert
Vorwärtstransformation (unverkippte Ebene → verkippte IP)¶
Ein Punkt \(P_1 = (X,\ Y,\ 0)\) auf der unverkippten \(XY\)-Ebene wird auf \(P_2 = R\,P_1\) auf der verkippten IP abgebildet.
Projektion (verkippte IP → unverkippte Ebene)¶
Tatsächlich benötigt wird die umgekehrte Richtung, nämlich die \(XY\)-Ebenenkoordinate, die ein „auf der verkippten IP beobachtetes Pixel" einnehmen würde, wenn keine Verkippung vorläge. Diese ergibt sich aus der zentralen (perspektivischen) Projektion, die den Punkt \(P_3\) bestimmt, in dem die Verbindungsgerade zwischen einem Punkt auf der verkippten IP und der Probe \((0,0,-\mathrm{CL})\) die \(XY\)-Ebene schneidet. Da es sich um eine projektive Transformation mit der Probe als Projektionszentrum handelt, ergibt sich
Da die gesamte Verkippungskorrektur eine lineare (in homogenen Koordinaten projektive) Transformation ist, lässt sich die Position jedes Pixels auf einem Computer schnell berechnen.
Pixelform-Korrektur¶
Die Pixelform der IP wird als Parallelogramm behandelt, mit der Länge \(\mathrm{PixSizeX}\) entlang der \(X\)-Achse, der Länge \(\mathrm{PixSizeY}\) entlang der \(Y\)-Achse und einer Abweichung vom rechten Winkel (Verzerrungswinkel) \(\xi\). Ein von null verschiedenes \(\xi\) bedeutet, dass es einen Versatz in der Startposition des Auslese-Laserscans gibt, und diese Software nimmt an, dass dieser Versatz entlang der \(Y\)-Achse konstant ist.
Die tatsächliche Koordinate \(P\) des Pixels, das vom zentralen Pixel aus gezählt um \(\mathrm{PixNumX}\) in \(X\)-Richtung und um \(\mathrm{PixNumY}\) in \(Y\)-Richtung entfernt ist, ergibt sich zu
Durch Kombination dieser Pixelform-Korrektur mit der oben beschriebenen Verkippungskorrektur lässt sich jedes Pixel auf einer verkippten IP auf seine korrekte Position auf der unverkippten \(XY\)-Ebene abbilden. Diese Abbildung bildet die Grundlage für die Parameterbestimmung im nächsten Kapitel und für A3. Bildintegration.