스크린샷은 영어로 표시됩니다
IPAnalyzer 인터페이스는 현재 영어와 일본어로만 현지화되어 있으므로, 본문이 번역되어 있더라도 이 페이지의 스크린샷은 영어로 표시됩니다.
Appendix A1. Detector geometry and coordinate transforms¶
이 페이지는 평판 검출기(IP, CCD/CMOS) 위의 픽셀 위치를 회절각으로 변환하기 위해 IPAnalyzer가 사용하는 좌표계, IP 기울기 보정, 픽셀 모양 보정을 수식과 함께 정의합니다. 좌표계의 개요는 appendix top page 및 0. Overview도 참조하십시오.
Coordinate system and parameters¶
IPAnalyzer는 내부적으로 일관되게 오른손 좌표계를 사용합니다.
- X선 또는 전자 빔이 IP와 교차하는 지점(direct spot)을 원점 \((0,0,0)\) 으로 잡고, \(Z\) 축을 빔 진행 방향에 일치시킵니다.
- 시료를 무한히 작은 것으로 간주하고, 시료와 원점 사이의 거리를 camera length \(\mathrm{CL}\) 로 정의합니다. 따라서 시료 위치는 \((0,\ 0,\ -\mathrm{CL})\) 입니다.
- \(X\) 축은 IP가 기울어지지 않았을 때 판독 레이저의 스캔 방향(이미지의 오른쪽 방향)에 일치시킵니다. 따라서 \(Y\) 축은 화면에서 아래쪽을 가리킵니다.
- 원뿔각 \(2\theta\) 의 회절 고리는 기울어지지 않은 \(XY\) 평면 위에서 반지름 \(\mathrm{CL}\tan 2\theta\) 의 완전한 원으로 관측됩니다.
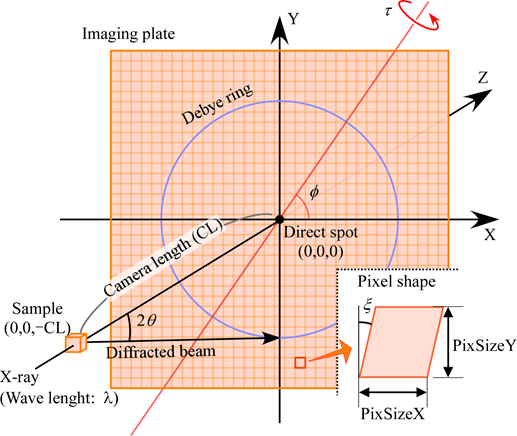
3D 물체의 자유로운 회전은 본질적으로 세 개의 축을 필요로 하지만, Debye 고리 분포는 \(Z\) 축에 관한 회전에 대해 불변이므로 \(X\) 축은 임의로 선택할 수 있습니다. 이로써 자유도가 하나 제거되어, IP 기울기는 두 개의 변수 \(\varphi,\ \tau\) 로 표현할 수 있습니다.
Correspondence with (WIN)PIP
레거시 소프트웨어 PIP는 기울기를 다른 한 쌍의 각도 \((\beta,\ \Phi)\) 로 표현합니다. \((\beta,\ \Phi)\) 에서 IPAnalyzer의 \((\varphi,\ \tau)\) 로의 변환은 \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\) 입니다. 자세한 내용은 0. Overview 의 "Relationship with (WIN)PIP" 를 참조하십시오.
IP tilt correction¶
광축(\(Z\) 축)에 대한 IP의 기울기는, 원점을 지나면서 \(XY\) 평면 안에 놓인 직선을 축으로 하는 회전으로 표현됩니다. 이 회전은 회전 행렬 \(R = R_2\,R_1\,R_2^{-1}\) 로 쓸 수 있으며, 이는 \(Z\) 축에 관해 \(\varphi\) 만큼 회전된(\(R_2\)) 축을 따라 \(\tau\) 만큼 회전시키는(\(R_1\)) 연산입니다.
이것은 \(XY\) 평면에서 \(X\) 축과 각도 \(\varphi\) 를 이루는 단위 벡터 \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\) 에 관해 각도 \(\tau\) 만큼 회전하는 것과 동등하며, 전개하면 다음을 얻습니다.
Forward transform (untilted plane → tilted IP)¶
기울어지지 않은 \(XY\) 평면 위의 점 \(P_1 = (X,\ Y,\ 0)\) 은 기울어진 IP 위의 \(P_2 = R\,P_1\) 로 변환됩니다.
Projection (tilted IP → untilted plane)¶
실제로 필요한 것은 그 역방향, 즉 "기울어진 IP 위에서 관측된 픽셀"이 기울기가 없었다면 차지했을 \(XY\) 평면 좌표입니다. 이것은 기울어진 IP 위의 한 점과 시료 \((0,0,-\mathrm{CL})\) 를 잇는 직선이 \(XY\) 평면과 교차하는 점 \(P_3\) 를 구하는 central (perspective) projection 으로 주어집니다. 이는 시료를 투영 중심으로 하는 사영 변환이므로,
가 됩니다. 기울기 보정 전체가 선형(동차 좌표에서 사영) 변환이므로, 각 픽셀의 위치를 컴퓨터에서 빠르게 계산할 수 있습니다.
Pixel-shape correction¶
IP의 픽셀 모양은, \(X\) 축을 따라 길이 \(\mathrm{PixSizeX}\), \(Y\) 축을 따라 길이 \(\mathrm{PixSizeY}\), 그리고 직각으로부터의 편차(왜곡각) \(\xi\) 를 갖는 평행사변형으로 다룹니다. \(\xi\) 가 0이 아니라는 것은 판독 레이저 스캔의 시작 위치에 오프셋이 있음을 의미하며, 이 소프트웨어는 이 오프셋이 \(Y\) 축을 따라 일정하다고 가정합니다.
중심 픽셀로부터 세어 \(X\) 방향으로 \(\mathrm{PixNumX}\), \(Y\) 방향으로 \(\mathrm{PixNumY}\) 만큼 떨어진 픽셀의 실제 좌표 \(P\) 는 다음으로 주어집니다.
이 픽셀 모양 보정을 위에서 설명한 기울기 보정과 결합함으로써, 기울어진 IP 위의 임의의 픽셀을 기울어지지 않은 \(XY\) 평면 위의 올바른 위치로 변환할 수 있습니다. 이 변환은 다음 장의 매개변수 결정과 A3. Image integration 의 기초가 됩니다.