Снимки экрана на английском
Интерфейс IPAnalyzer в настоящее время локализован только на английский и японский языки, поэтому снимки экрана на этой странице показаны на английском, даже если текст переведён.
Приложение A1. Геометрия детектора и преобразования координат¶
На этой странице с помощью уравнений определяются система координат, коррекция наклона IP и коррекция формы пикселя, которые IPAnalyzer использует для сопоставления позиций пикселей на плоском детекторе (IP, CCD/CMOS) с углами дифракции. Обзор системы координат см. также на верхней странице приложения и в разделе 0. Обзор.
Система координат и параметры¶
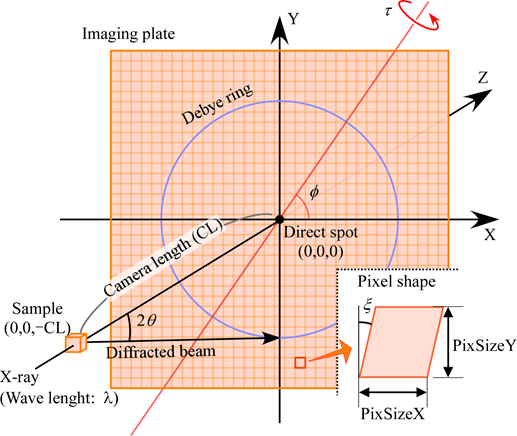
IPAnalyzer внутренне последовательно использует правостороннюю систему координат.
- Точка, в которой рентгеновский или электронный пучок пересекает IP (direct spot), принимается за начало координат \((0,0,0)\), а ось \(Z\) совмещается с направлением распространения пучка.
- Рассматривая образец как бесконечно малый, расстояние между образцом и началом координат определяется как длина камеры \(\mathrm{CL}\). Поэтому позиция образца составляет \((0,\ 0,\ -\mathrm{CL})\).
- Ось \(X\) совмещается с направлением сканирования считывающего лазера, когда IP не наклонён (направление вправо по изображению). Поэтому ось \(Y\) направлена вниз по экрану.
- Дифракционное кольцо с углом конуса \(2\theta\) наблюдается на ненаклонённой плоскости \(XY\) как идеальная окружность радиуса \(\mathrm{CL}\tan 2\theta\).
Свободное вращение 3D-объекта по своей сути требует трёх осей, но поскольку распределение колец Дебая инвариантно относительно вращения вокруг оси \(Z\), ось \(X\) можно выбрать произвольно. Это устраняет одну степень свободы, поэтому наклон IP можно выразить с помощью двух переменных \(\varphi,\ \tau\).
Correspondence with (WIN)PIP
Устаревшее программное обеспечение PIP выражает наклон с помощью другой пары углов \((\beta,\ \Phi)\). Преобразование из \((\beta,\ \Phi)\) в \((\varphi,\ \tau)\) IPAnalyzer задаётся как \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\). Подробности см. в разделе "Relationship with (WIN)PIP" в 0. Обзор.
Коррекция наклона IP¶
Наклон IP относительно оптической оси (оси \(Z\)) представляется вращением, ось которого — прямая, проходящая через начало координат и лежащая в плоскости \(XY\). Это вращение можно записать как матрицу вращения \(R = R_2\,R_1\,R_2^{-1}\) — операцию, которая поворачивает на \(\tau\) вокруг (\(R_1\)) оси, повёрнутой на \(\varphi\) вокруг оси \(Z\) (\(R_2\)).
Это эквивалентно вращению на угол \(\tau\) вокруг единичного вектора \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\), составляющего угол \(\varphi\) с осью \(X\) в плоскости \(XY\), и после раскрытия получаем
Прямое преобразование (ненаклонённая плоскость → наклонённый IP)¶
Точка \(P_1 = (X,\ Y,\ 0)\) на ненаклонённой плоскости \(XY\) отображается в \(P_2 = R\,P_1\) на наклонённом IP.
Проекция (наклонённый IP → ненаклонённая плоскость)¶
На самом деле требуется обратное направление, а именно координата на плоскости \(XY\), которую занимал бы "пиксель, наблюдаемый на наклонённом IP", если бы наклона не было. Она задаётся центральной (перспективной) проекцией, которая находит точку \(P_3\), где прямая, соединяющая точку на наклонённом IP и образец \((0,0,-\mathrm{CL})\), пересекает плоскость \(XY\). Поскольку это проективное преобразование с образцом в качестве центра проекции, получается
Поскольку вся коррекция наклона является линейным (проективным в однородных координатах) преобразованием, позицию каждого пикселя можно быстро вычислить на компьютере.
Коррекция формы пикселя¶
Форма пикселя IP рассматривается как параллелограмм с длиной \(\mathrm{PixSizeX}\) вдоль оси \(X\), длиной \(\mathrm{PixSizeY}\) вдоль оси \(Y\) и отклонением от прямого угла (углом искажения) \(\xi\). Ненулевое значение \(\xi\) означает наличие смещения в начальной позиции сканирования считывающего лазера, и данное программное обеспечение предполагает, что это смещение постоянно вдоль оси \(Y\).
Фактическая координата \(P\) пикселя, отстоящего на \(\mathrm{PixNumX}\) в направлении \(X\) и на \(\mathrm{PixNumY}\) в направлении \(Y\), отсчитываемая от центрального пикселя, задаётся выражением
Комбинируя эту коррекцию формы пикселя с описанной выше коррекцией наклона, любой пиксель на наклонённом IP можно сопоставить с его правильной позицией на ненаклонённой плоскости \(XY\). Это сопоставление является основой для определения параметров в следующей главе и для раздела A3. Интегрирование изображения.