Capturas de pantalla en inglés
La interfaz de IPAnalyzer solo está localizada actualmente en inglés y japonés, por lo que las capturas de pantalla de esta página se muestran en inglés aunque el texto esté traducido.
Apéndice A1. Geometría del detector y transformaciones de coordenadas¶
Esta página define, mediante ecuaciones, el sistema de coordenadas, la corrección de inclinación de la IP y la corrección de la forma de píxel que IPAnalyzer utiliza para mapear las posiciones de los píxeles en un detector plano (IP, CCD/CMOS) a ángulos de difracción. Para una visión general del sistema de coordenadas, véanse también la página principal del apéndice y 0. Overview.
Sistema de coordenadas y parámetros¶
IPAnalyzer utiliza de forma coherente un sistema de coordenadas dextrógiro (right-handed) internamente.
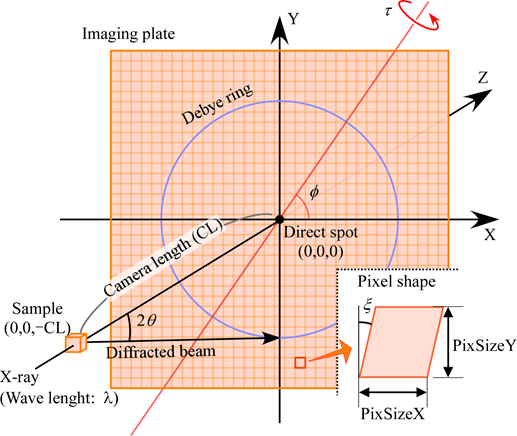
- El punto donde el haz de rayos X o de electrones intersecta la IP (el direct spot) se toma como el origen \((0,0,0)\), y el eje \(Z\) se alinea con la dirección de propagación del haz.
- Tratando la muestra como infinitesimalmente pequeña, la distancia entre la muestra y el origen se define como la longitud de cámara \(\mathrm{CL}\). La posición de la muestra es, por tanto, \((0,\ 0,\ -\mathrm{CL})\).
- El eje \(X\) se alinea con la dirección de barrido del láser de lectura cuando la IP no está inclinada (la dirección hacia la derecha de la imagen). El eje \(Y\), por consiguiente, apunta hacia abajo en la pantalla.
- Un anillo de difracción con ángulo de cono \(2\theta\) se observa, en un plano \(XY\) no inclinado, como un círculo perfecto de radio \(\mathrm{CL}\tan 2\theta\).
La rotación libre de un objeto 3D requiere intrínsecamente tres ejes, pero como la distribución del anillo de Debye es invariante bajo rotación alrededor del eje \(Z\), el eje \(X\) puede elegirse arbitrariamente. Esto elimina un grado de libertad, de modo que la inclinación de la IP puede expresarse con dos variables \(\varphi,\ \tau\).
Correspondence with (WIN)PIP
El software heredado PIP expresa la inclinación con un par diferente de ángulos \((\beta,\ \Phi)\). La conversión de \((\beta,\ \Phi)\) a los \((\varphi,\ \tau)\) de IPAnalyzer es \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\). Para más detalles, véase "Relationship with (WIN)PIP" en 0. Overview.
Corrección de inclinación de la IP¶
La inclinación de la IP respecto al eje óptico (el eje \(Z\)) se representa mediante una rotación cuyo eje es una recta que pasa por el origen y se sitúa en el plano \(XY\). Esta rotación puede escribirse como la matriz de rotación \(R = R_2\,R_1\,R_2^{-1}\), una operación que rota un ángulo \(\tau\) a lo largo de (\(R_1\)) un eje que ha sido rotado un ángulo \(\varphi\) alrededor del eje \(Z\) (\(R_2\)).
Esto equivale a una rotación de ángulo \(\tau\) alrededor del vector unitario \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\) que forma un ángulo \(\varphi\) con el eje \(X\) en el plano \(XY\), y al desarrollarla se obtiene
Transformación directa (plano no inclinado → IP inclinada)¶
Un punto \(P_1 = (X,\ Y,\ 0)\) en el plano \(XY\) no inclinado se mapea a \(P_2 = R\,P_1\) en la IP inclinada.
Proyección (IP inclinada → plano no inclinado)¶
Lo que realmente se necesita es la dirección inversa, es decir, la coordenada en el plano \(XY\) que ocuparía un "píxel observado en la IP inclinada" si no hubiera inclinación. Esto viene dado por la proyección central (en perspectiva) que encuentra el punto \(P_3\) donde la recta que une un punto de la IP inclinada con la muestra \((0,0,-\mathrm{CL})\) intersecta el plano \(XY\). Dado que se trata de una transformación proyectiva con la muestra como centro de proyección, resulta
Como toda la corrección de inclinación es una transformación lineal (proyectiva en coordenadas homogéneas), la posición de cada píxel puede calcularse rápidamente en un ordenador.
Corrección de la forma de píxel¶
La forma de píxel de la IP se trata como un paralelogramo con longitud \(\mathrm{PixSizeX}\) a lo largo del eje \(X\), longitud \(\mathrm{PixSizeY}\) a lo largo del eje \(Y\), y una desviación del ángulo recto (ángulo de distorsión) \(\xi\). Un \(\xi\) distinto de cero significa que existe un desplazamiento en la posición de inicio del barrido del láser de lectura, y este software supone que dicho desplazamiento es constante a lo largo del eje \(Y\).
La coordenada real \(P\) del píxel que está a \(\mathrm{PixNumX}\) de distancia en la dirección \(X\) y a \(\mathrm{PixNumY}\) de distancia en la dirección \(Y\), contando desde el píxel central, viene dada por
Combinando esta corrección de la forma de píxel con la corrección de inclinación descrita anteriormente, cualquier píxel de una IP inclinada puede mapearse a su posición correcta en el plano \(XY\) no inclinado. Este mapeo es la base para la determinación de parámetros del capítulo siguiente y para A3. Image integration.