Capturas de tela em inglês
A interface do IPAnalyzer está atualmente localizada apenas em inglês e japonês, portanto as capturas de tela desta página são exibidas em inglês, mesmo que o texto esteja traduzido.
Apêndice A1. Geometria do detector e transformações de coordenadas¶
Esta página define, com equações, o sistema de coordenadas, a correção de inclinação do IP e a correção da forma do pixel que o IPAnalyzer usa para mapear posições de pixel em um detector plano (IP, CCD/CMOS) para ângulos de difração. Para uma visão geral do sistema de coordenadas, veja também a página inicial do apêndice e 0. Visão geral.
Sistema de coordenadas e parâmetros¶
O IPAnalyzer usa de forma consistente, internamente, um sistema de coordenadas dextrogiro (right-handed).
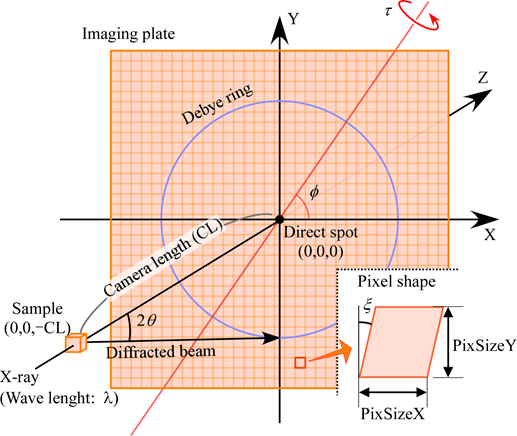
- O ponto onde o feixe de raios X ou de elétrons intercepta o IP (o direct spot) é tomado como a origem \((0,0,0)\), e o eixo \(Z\) é alinhado com a direção de propagação do feixe.
- Tratando a amostra como infinitesimalmente pequena, a distância entre a amostra e a origem é definida como o comprimento de câmara \(\mathrm{CL}\). A posição da amostra é, portanto, \((0,\ 0,\ -\mathrm{CL})\).
- O eixo \(X\) é alinhado com a direção de varredura do laser de leitura quando o IP não está inclinado (a direção para a direita da imagem). O eixo \(Y\) aponta, portanto, para baixo na tela.
- Um anel de difração com ângulo de cone \(2\theta\) é observado, em um plano \(XY\) não inclinado, como um círculo perfeito de raio \(\mathrm{CL}\tan 2\theta\).
A rotação livre de um objeto 3D requer inerentemente três eixos, mas como a distribuição do anel de Debye é invariante sob rotação em torno do eixo \(Z\), o eixo \(X\) pode ser escolhido arbitrariamente. Isso remove um grau de liberdade, de modo que a inclinação do IP pode ser expressa com duas variáveis \(\varphi,\ \tau\).
Correspondence with (WIN)PIP
O software legado PIP expressa a inclinação com um par diferente de ângulos \((\beta,\ \Phi)\). A conversão de \((\beta,\ \Phi)\) para o \((\varphi,\ \tau)\) do IPAnalyzer é \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\). Para detalhes, veja "Relationship with (WIN)PIP" em 0. Visão geral.
Correção de inclinação do IP¶
A inclinação do IP em relação ao eixo óptico (o eixo \(Z\)) é representada por uma rotação cujo eixo é uma reta que passa pela origem e está contida no plano \(XY\). Essa rotação pode ser escrita como a matriz de rotação \(R = R_2\,R_1\,R_2^{-1}\), uma operação que rotaciona por \(\tau\) ao longo (\(R_1\)) de um eixo que foi rotacionado por \(\varphi\) em torno do eixo \(Z\) (\(R_2\)).
Isso é equivalente a uma rotação por ângulo \(\tau\) em torno do vetor unitário \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\) que forma ângulo \(\varphi\) com o eixo \(X\) no plano \(XY\), e expandindo resulta
Transformação direta (plano não inclinado → IP inclinado)¶
Um ponto \(P_1 = (X,\ Y,\ 0)\) no plano \(XY\) não inclinado mapeia para \(P_2 = R\,P_1\) no IP inclinado.
Projeção (IP inclinado → plano não inclinado)¶
O que de fato é necessário é a direção inversa, isto é, a coordenada no plano \(XY\) que um "pixel observado no IP inclinado" ocuparia se não houvesse inclinação. Isso é dado pela projeção central (em perspectiva) que encontra o ponto \(P_3\) onde a reta que une um ponto no IP inclinado e a amostra \((0,0,-\mathrm{CL})\) intercepta o plano \(XY\). Como esta é uma transformação projetiva com a amostra como o centro de projeção,
resulta. Como toda a correção de inclinação é uma transformação linear (projetiva em coordenadas homogêneas), a posição de cada pixel pode ser calculada rapidamente em um computador.
Correção da forma do pixel¶
A forma do pixel do IP é tratada como um paralelogramo com comprimento \(\mathrm{PixSizeX}\) ao longo do eixo \(X\), comprimento \(\mathrm{PixSizeY}\) ao longo do eixo \(Y\) e um desvio do ângulo reto (ângulo de distorção) \(\xi\). Um \(\xi\) não nulo significa que há um deslocamento na posição inicial da varredura do laser de leitura, e este software assume que esse deslocamento é constante ao longo do eixo \(Y\).
A coordenada real \(P\) do pixel que está a \(\mathrm{PixNumX}\) de distância na direção \(X\) e a \(\mathrm{PixNumY}\) de distância na direção \(Y\), contando a partir do pixel central, é dada por
Combinando esta correção da forma do pixel com a correção de inclinação descrita acima, qualquer pixel em um IP inclinado pode ser mapeado para sua posição correta no plano \(XY\) não inclinado. Esse mapeamento é a base para a determinação de parâmetros no próximo capítulo e para A3. Integração da imagem.