Appendix A1. 検出器の幾何と座標変換¶
このページでは、IPAnalyzer が平面検出器(IP・CCD/CMOS)上の画素位置と回折角を対応づけるために用いる 座標系・IP の傾き補正・画素形状補正 を数式で定義します。座標系の概観は 付録トップ と 0. 概要 も参照してください。
座標系とパラメータ¶
IPAnalyzer は内部で一貫して 右手系 を採用します。
- X 線あるいは電子線が IP と交わる点(ダイレクトスポット)を原点 \((0,0,0)\) とし、\(Z\) 軸をビームの進行方向に一致させます。
- サンプルを無限小とみなしたときの、サンプルと原点との距離を カメラ長 \(\mathrm{CL}\) と定義します。したがってサンプル位置は \((0,\ 0,\ -\mathrm{CL})\) です。
- \(X\) 軸は、IP が傾いていないときの読み取りレーザーの走査方向(画像の右方向)に一致させます。よって \(Y\) 軸は画面下向きになります。
- 円錐角 \(2\theta\) の回折リングは、傾きのない \(XY\) 平面上では半径 \(\mathrm{CL}\tan 2\theta\) の真円として観察されます。
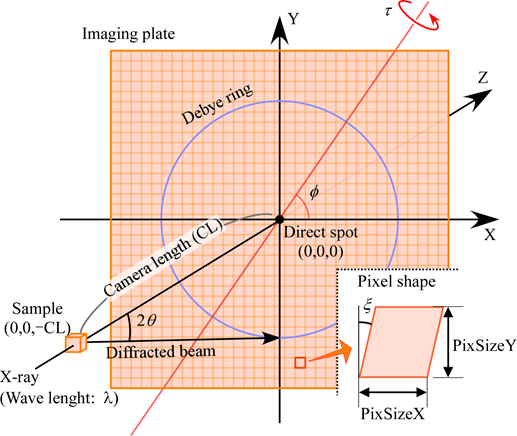
3 次元物体の自由回転には本来 3 軸が必要ですが、デバイ環の分布は \(Z\) 軸まわりの回転に対して不変なので、\(X\) 軸を恣意的に選ぶことができます。このため自由度が 1 つ減り、IP の傾きは 2 つの変数 \(\varphi,\ \tau\) で表現できます。
(WIN)PIP との対応
旧ソフト PIP では傾きを別の角度 \((\beta,\ \Phi)\) で表します。\((\beta,\ \Phi)\) から IPAnalyzer の \((\varphi,\ \tau)\) への変換は \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\) です。詳細は 0. 概要 の「(WIN)PIP との関係」を参照してください。
IP の傾き補正¶
IP の光軸(\(Z\) 軸)に対する傾きは、原点を通り \(XY\) 平面上にある直線を回転軸とする回転で表します。この回転は、\(Z\) 軸まわりに \(\varphi\) 回した軸(\(R_2\))に沿って \(\tau\) だけ回す(\(R_1\))操作として、回転行列 \(R = R_2\,R_1\,R_2^{-1}\) で書けます。
これは、\(XY\) 平面内で \(X\) 軸と角 \(\varphi\) をなす単位ベクトル \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\) を軸とする角 \(\tau\) の回転に等しく、展開すると
となります。
順変換(傾きのない面 → 傾いた IP)¶
傾きのない \(XY\) 平面上の点 \(P_1 = (X,\ Y,\ 0)\) は、傾いた IP 上では \(P_2 = R\,P_1\) に写ります。
射影(傾いた IP → 傾きのない面)¶
実際に必要なのは逆向き、すなわち「傾いた IP 上で観測された画素」が、傾きがなければ受け持つはずの \(XY\) 平面上の座標です。これは、傾いた IP 上の点とサンプル \((0,0,-\mathrm{CL})\) を結ぶ直線が \(XY\) 平面と交わる点 \(P_3\) を求める 中心投影(透視投影) で与えられます。サンプルを投影中心とする射影変換なので、
の形にまとまります。傾き補正全体は線形(同次座標では射影)変換なので、各画素の位置をコンピュータ上で高速に計算できます。
画素形状の補正¶
IP の画素形状は、\(X\) 軸方向の長さ \(\mathrm{PixSizeX}\)、\(Y\) 軸方向の長さ \(\mathrm{PixSizeY}\)、および直角からのずれ(歪み角)\(\xi\) をもつ 平行四辺形 として扱います。\(\xi \neq 0\) は、読み取りレーザーのスキャン開始点の位置にずれがあることを意味し、本ソフトではこのずれは \(Y\) 軸方向に対して一定であると仮定します。
中心画素から数えて \(X\) 方向に \(\mathrm{PixNumX}\)、\(Y\) 方向に \(\mathrm{PixNumY}\) だけ離れた画素の実座標 \(P\) は、
で与えられます。この画素形状補正と、上で述べた傾き補正を組み合わせることで、傾いた IP 上の任意の画素を、傾きのない \(XY\) 平面上の正しい位置へ対応づけられます。この対応づけが、次章のパラメータ決定と A3. 画像の積算 の前提になります。