螢幕截圖為英文
IPAnalyzer 的介面目前僅在地化為英文與日文,因此本頁的螢幕截圖以英文顯示,即使內文已翻譯。
Appendix A1. 偵測器幾何與座標變換¶
本頁以方程式定義 IPAnalyzer 用來將平板偵測器(IP、CCD/CMOS)上的像素位置對應到繞射角的座標系、IP 傾斜校正與像素形狀校正。關於座標系的概觀,另請參閱附錄首頁與 0. Overview。
座標系與參數¶
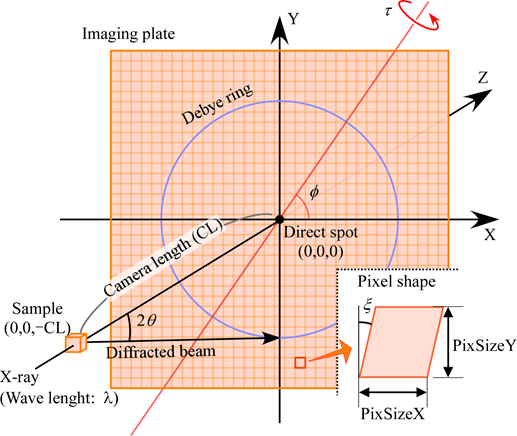
IPAnalyzer 在內部一致地使用右手座標系。
- 將 X 射線或電子束與 IP 相交之點(direct spot)取為原點 \((0,0,0)\),並使 \(Z\) 軸與束流傳播方向對齊。
- 將樣品視為無限小,並將樣品與原點之間的距離定義為相機長度 \(\mathrm{CL}\)。因此樣品位置為 \((0,\ 0,\ -\mathrm{CL})\)。
- 當 IP 未傾斜時,\(X\) 軸與讀取雷射的掃描方向(影像的向右方向)對齊。因此 \(Y\) 軸在螢幕上指向下方。
- 錐角為 \(2\theta\) 的繞射環,在未傾斜的 \(XY\) 平面上,會被觀測為半徑 \(\mathrm{CL}\tan 2\theta\) 的正圓。
3D 物體的自由旋轉本質上需要三個軸,但由於 Debye 環的分布在繞 \(Z\) 軸旋轉下不變,故 \(X\) 軸可任意選取。這移除了一個自由度,因此 IP 傾斜可用兩個變數 \(\varphi,\ \tau\) 表示。
與 (WIN)PIP 的對應
舊版軟體 PIP 以另一組角度 \((\beta,\ \Phi)\) 表示傾斜。從 \((\beta,\ \Phi)\) 至 IPAnalyzer 的 \((\varphi,\ \tau)\) 的換算為 \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\)。詳情請參閱 0. Overview 中的「Relationship with (WIN)PIP」。
IP 傾斜校正¶
IP 相對於光軸(\(Z\) 軸)的傾斜,由一個旋轉表示,其旋轉軸為通過原點且位於 \(XY\) 平面內的一條直線。此旋轉可寫為旋轉矩陣 \(R = R_2\,R_1\,R_2^{-1}\),此運算是沿著(\(R_1\))一個已繞 \(Z\) 軸旋轉 \(\varphi\)(\(R_2\))的軸,旋轉 \(\tau\)。
這等同於繞著單位向量 \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\)(其在 \(XY\) 平面內與 \(X\) 軸夾角為 \(\varphi\))旋轉角度 \(\tau\),展開後得到
正向變換(未傾斜平面 → 傾斜 IP)¶
未傾斜 \(XY\) 平面上的一點 \(P_1 = (X,\ Y,\ 0)\),對應到傾斜 IP 上的 \(P_2 = R\,P_1\)。
投影(傾斜 IP → 未傾斜平面)¶
實際所需的是相反方向,亦即「在傾斜 IP 上觀測到的某像素」若無傾斜時所應佔據的 \(XY\) 平面座標。這由中心(透視)投影給出,即求出連接傾斜 IP 上一點與樣品 \((0,0,-\mathrm{CL})\) 的直線與 \(XY\) 平面相交之點 \(P_3\)。由於這是以樣品為投影中心的射影變換,故得到
由於整個傾斜校正是線性的(在齊次座標下為射影)變換,每個像素的位置都能在電腦上快速計算。
像素形狀校正¶
IP 的像素形狀被視為一個平行四邊形,沿 \(X\) 軸長度為 \(\mathrm{PixSizeX}\)、沿 \(Y\) 軸長度為 \(\mathrm{PixSizeY}\),並具有偏離直角的量(畸變角)\(\xi\)。\(\xi\) 非零意味著讀取雷射掃描的起始位置存在偏移,且本軟體假設此偏移沿 \(Y\) 軸為常數。
從中央像素起算、在 \(X\) 方向偏離 \(\mathrm{PixNumX}\)、在 \(Y\) 方向偏離 \(\mathrm{PixNumY}\) 的像素,其實際座標 \(P\) 由下式給出
將此像素形狀校正與上述傾斜校正結合,傾斜 IP 上的任一像素都能對應到其在未傾斜 \(XY\) 平面上的正確位置。此對應是下一章參數決定以及 A3. Image integration 的基礎。