屏幕截图为英文
IPAnalyzer 的界面目前仅本地化为英文和日文,因此本页的屏幕截图以英文显示,即使正文已翻译。
Appendix A1. Detector geometry and coordinate transforms¶
本页用公式定义 IPAnalyzer 将平板探测器(IP、CCD/CMOS)上的像素位置映射为衍射角时所使用的坐标系、IP 倾斜校正与像素形状校正。关于坐标系的概览,另请参阅附录首页与 0. Overview。
Coordinate system and parameters¶
IPAnalyzer 在内部始终使用右手坐标系。
- 将 X 射线或电子束与 IP 相交的点(direct spot)取为原点 \((0,0,0)\),并令 \(Z\) 轴与束流传播方向一致。
- 将样品视为无限小,样品与原点之间的距离定义为相机长度 \(\mathrm{CL}\)。因此样品位置为 \((0,\ 0,\ -\mathrm{CL})\)。
- 当 IP 未倾斜时,\(X\) 轴与读出激光的扫描方向(图像的向右方向)一致。因此 \(Y\) 轴在屏幕上指向下方。
- 锥角为 \(2\theta\) 的衍射环,在未倾斜的 \(XY\) 平面上,观察为半径 \(\mathrm{CL}\tan 2\theta\) 的正圆。
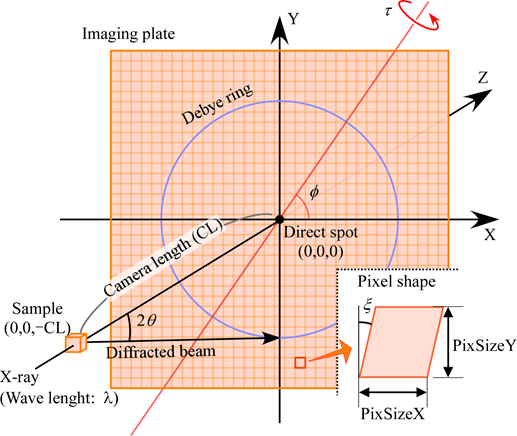
三维物体的自由旋转本质上需要三个轴,但由于 Debye 环的分布在绕 \(Z\) 轴旋转下保持不变,\(X\) 轴可以任意选取。这消除了一个自由度,因此 IP 倾斜可以用两个变量 \(\varphi,\ \tau\) 来表示。
Correspondence with (WIN)PIP
旧版软件 PIP 用另一对角度 \((\beta,\ \Phi)\) 来表示倾斜。从 \((\beta,\ \Phi)\) 到 IPAnalyzer 的 \((\varphi,\ \tau)\) 的转换为 \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\)。详情请参阅 0. Overview 中的 "Relationship with (WIN)PIP"。
IP tilt correction¶
IP 相对于光轴(\(Z\) 轴)的倾斜,由一个旋转表示,其旋转轴是一条经过原点且位于 \(XY\) 平面内的直线。该旋转可写成旋转矩阵 \(R = R_2\,R_1\,R_2^{-1}\),即沿着一个已绕 \(Z\) 轴旋转了 \(\varphi\)(\(R_2\))的轴旋转 \(\tau\)(\(R_1\))的操作。
这等价于绕在 \(XY\) 平面内与 \(X\) 轴成 \(\varphi\) 角的单位向量 \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\) 旋转角度 \(\tau\),展开后得到
Forward transform (untilted plane → tilted IP)¶
未倾斜 \(XY\) 平面上的点 \(P_1 = (X,\ Y,\ 0)\) 映射到倾斜 IP 上的 \(P_2 = R\,P_1\)。
Projection (tilted IP → untilted plane)¶
实际需要的是反方向,即"在倾斜 IP 上观察到的像素"在没有倾斜时所应占据的 \(XY\) 平面坐标。这由中心(透视)投影给出,它求出连接倾斜 IP 上的某点与样品 \((0,0,-\mathrm{CL})\) 的直线与 \(XY\) 平面的交点 \(P_3\)。由于这是以样品为投影中心的射影变换,
即为所求结果。由于整个倾斜校正是一个线性(在齐次坐标下为射影)变换,每个像素的位置都可以在计算机上快速计算。
Pixel-shape correction¶
IP 的像素形状被视为一个平行四边形,沿 \(X\) 轴长度为 \(\mathrm{PixSizeX}\),沿 \(Y\) 轴长度为 \(\mathrm{PixSizeY}\),并带有偏离直角的偏差(畸变角)\(\xi\)。\(\xi\) 非零意味着读出激光扫描的起始位置存在偏移,本软件假定该偏移沿 \(Y\) 轴为恒定值。
从中心像素起算、在 \(X\) 方向上相距 \(\mathrm{PixNumX}\)、在 \(Y\) 方向上相距 \(\mathrm{PixNumY}\) 的像素,其实际坐标 \(P\) 由下式给出
将这一像素形状校正与上述倾斜校正相结合,倾斜 IP 上的任何像素都可以映射到未倾斜 \(XY\) 平面上的正确位置。此映射是下一章参数确定以及 A3. Image integration 的基础。