Screenshot in inglese
L'interfaccia di IPAnalyzer è attualmente localizzata solo in inglese e giapponese, quindi gli screenshot di questa pagina sono mostrati in inglese anche se il testo è tradotto.
Appendice A1. Geometria del rivelatore e trasformazioni di coordinate¶
Questa pagina definisce, con equazioni, il sistema di coordinate, la correzione dell'inclinazione dell'IP e la correzione della forma del pixel che IPAnalyzer utilizza per mappare le posizioni dei pixel su un rivelatore piatto (IP, CCD/CMOS) agli angoli di diffrazione. Per una panoramica del sistema di coordinate, si vedano anche la pagina iniziale dell'appendice e la 0. Panoramica.
Sistema di coordinate e parametri¶
IPAnalyzer utilizza internamente in modo coerente un sistema di coordinate destrorso.
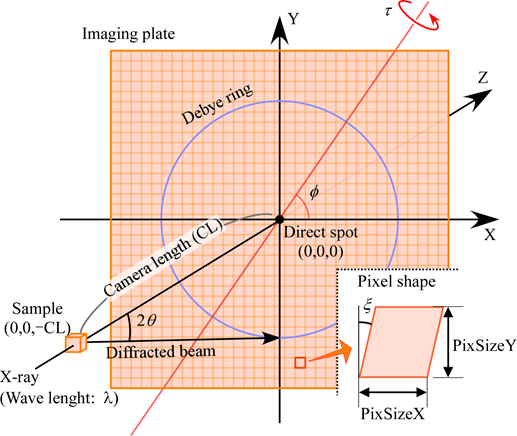
- Il punto in cui il fascio di raggi X o di elettroni interseca l'IP (lo spot diretto) è preso come origine \((0,0,0)\), e l'asse \(Z\) è allineato con la direzione di propagazione del fascio.
- Trattando il campione come infinitamente piccolo, la distanza tra il campione e l'origine è definita come lunghezza di camera \(\mathrm{CL}\). La posizione del campione è quindi \((0,\ 0,\ -\mathrm{CL})\).
- L'asse \(X\) è allineato con la direzione di scansione del laser di lettura quando l'IP non è inclinato (la direzione verso destra dell'immagine). L'asse \(Y\) punta quindi verso il basso sullo schermo.
- Un anello di diffrazione con angolo del cono \(2\theta\) viene osservato, su un piano \(XY\) non inclinato, come un cerchio perfetto di raggio \(\mathrm{CL}\tan 2\theta\).
La rotazione libera di un oggetto 3D richiede intrinsecamente tre assi, ma poiché la distribuzione dell'anello di Debye è invariante rispetto alla rotazione attorno all'asse \(Z\), l'asse \(X\) può essere scelto arbitrariamente. Ciò elimina un grado di libertà, cosicché l'inclinazione dell'IP può essere espressa con due variabili \(\varphi,\ \tau\).
Correspondence with (WIN)PIP
Il software legacy PIP esprime l'inclinazione con una coppia di angoli diversa \((\beta,\ \Phi)\). La conversione da \((\beta,\ \Phi)\) ai \((\varphi,\ \tau)\) di IPAnalyzer è \((\beta,\ \Phi)\rightarrow(270^\circ-\beta,\ \Phi)\). Per i dettagli, si veda "Relationship with (WIN)PIP" in 0. Panoramica.
Correzione dell'inclinazione dell'IP¶
L'inclinazione dell'IP rispetto all'asse ottico (l'asse \(Z\)) è rappresentata da una rotazione il cui asse è una retta passante per l'origine e giacente nel piano \(XY\). Questa rotazione può essere scritta come la matrice di rotazione \(R = R_2\,R_1\,R_2^{-1}\), un'operazione che ruota di \(\tau\) attorno a (\(R_1\)) un asse che è stato ruotato di \(\varphi\) attorno all'asse \(Z\) (\(R_2\)).
Ciò equivale a una rotazione di angolo \(\tau\) attorno al versore \(\mathbf{n} = (\cos\varphi,\ \sin\varphi,\ 0)\) che forma un angolo \(\varphi\) con l'asse \(X\) nel piano \(XY\), e sviluppando si ottiene
Trasformazione diretta (piano non inclinato → IP inclinato)¶
Un punto \(P_1 = (X,\ Y,\ 0)\) sul piano \(XY\) non inclinato viene mappato in \(P_2 = R\,P_1\) sull'IP inclinato.
Proiezione (IP inclinato → piano non inclinato)¶
Ciò che serve effettivamente è la direzione inversa, ovvero la coordinata sul piano \(XY\) che un "pixel osservato sull'IP inclinato" occuperebbe se non vi fosse alcuna inclinazione. Questa è data dalla proiezione centrale (prospettica) che trova il punto \(P_3\) in cui la retta che congiunge un punto sull'IP inclinato e il campione \((0,0,-\mathrm{CL})\) interseca il piano \(XY\). Poiché si tratta di una trasformazione proiettiva con il campione come centro di proiezione,
ne risulta. Poiché l'intera correzione dell'inclinazione è una trasformazione lineare (proiettiva in coordinate omogenee), la posizione di ciascun pixel può essere calcolata rapidamente su un computer.
Correzione della forma del pixel¶
La forma del pixel dell'IP è trattata come un parallelogramma con lunghezza \(\mathrm{PixSizeX}\) lungo l'asse \(X\), lunghezza \(\mathrm{PixSizeY}\) lungo l'asse \(Y\) e una deviazione dall'angolo retto (angolo di distorsione) \(\xi\). Un \(\xi\) non nullo significa che vi è uno scostamento nella posizione iniziale della scansione del laser di lettura, e questo software assume che tale scostamento sia costante lungo l'asse \(Y\).
La coordinata effettiva \(P\) del pixel che dista \(\mathrm{PixNumX}\) nella direzione \(X\) e \(\mathrm{PixNumY}\) nella direzione \(Y\), contando a partire dal pixel centrale, è data da
Combinando questa correzione della forma del pixel con la correzione dell'inclinazione descritta sopra, qualsiasi pixel su un IP inclinato può essere mappato nella sua posizione corretta sul piano \(XY\) non inclinato. Questa mappatura è la base per la determinazione dei parametri nel capitolo successivo e per la A3. Integrazione dell'immagine.