Capturas de tela em inglês
A interface do IPAnalyzer está atualmente localizada apenas em inglês e japonês, portanto as capturas de tela desta página são exibidas em inglês, mesmo que o texto esteja traduzido.
Apêndice¶
Este apêndice resume o embasamento teórico da geometria e dos algoritmos que o IPAnalyzer utiliza ao converter uma imagem de difração bidimensional (anéis de Debye–Scherrer) em um perfil unidimensional de alta precisão. Para procedimentos operacionais e instruções de uso de cada recurso, consulte o manual principal (0. Visão geral, 4. Procedimentos práticos, etc.). Aqui explicamos, com equações, as definições do sistema de coordenadas, as transformações de coordenadas, os métodos de determinação de parâmetros e o algoritmo de integração por trás disso.
O conteúdo baseia-se no documento legado doc/IPAnalyzerAlgorithm.pdf incluído no pacote de distribuição e na implementação atual.
Estrutura do apêndice¶
- A1. Geometria do detector e transformações de coordenadas — definição do sistema de coordenadas destro, as matrizes de rotação que descrevem a inclinação da IP (\(\varphi,\ \tau\)) e a correção da forma do pixel (\(\mathrm{PixSizeX},\ \mathrm{PixSizeY},\ \xi\)).
- A2. Determinação de parâmetros — calibração do comprimento de câmara, comprimento de onda, tamanho do pixel e inclinação da IP usando um material de referência (método de duas distâncias, método de duas linhas, ajuste de elipse).
- A3. Integração da imagem — o algoritmo de particionamento de área que distribui as intensidades dos pixels em passos angulares.
- A4. Informação de simetria — simetria do grupo espacial, cálculos geométricos, posições de Wyckoff, condições de reflexão e diagramas de elementos de simetria do cristal padrão (uma subjanela da janela Crystal).
- A5. Fator de espalhamento — fatores de estrutura e a lista de reflexões do cristal padrão (raios X, elétrons, nêutrons) (uma subjanela da janela Crystal).
Sistema de coordenadas (figura de referência comum)¶
Cada uma das páginas a seguir pressupõe o mesmo sistema de coordenadas como premissa comum. A origem é o ponto direto (direct spot) na IP (o ponto onde o feixe intercepta a IP), o eixo \(Z\) é a direção de propagação do feixe e a amostra está localizada em \((0,\ 0,\ -\mathrm{CL})\).
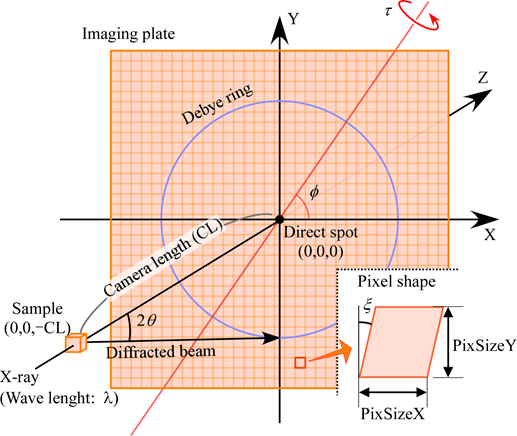
Parâmetros principais¶
| Símbolo | Nome | Significado |
|---|---|---|
| \(\lambda\) | Wave Length | Comprimento de onda da fonte. Conhecido para raios X característicos; para radiação síncrotron varia com a posição do monocromador e deve ser determinado a cada vez. |
| \(\mathrm{CL}\) | Camera Length | Distância entre a amostra e a origem (direct spot). A posição da amostra é \((0,0,-\mathrm{CL})\). |
| \(\varphi,\ \tau\) | Tilt Correction | Inclinação da IP em relação ao eixo óptico (eixo \(Z\)). \(\varphi\) é o azimute do eixo de inclinação no plano XY e \(\tau\) é o ângulo de rotação em torno desse eixo. |
| \(\mathrm{PixSizeX},\ \mathrm{PixSizeY},\ \xi\) | Pixel Size | Representa um pixel como um paralelogramo. \(\xi\) é o deslocamento do ponto inicial de varredura do laser de leitura (ângulo de distorção). |
Esses valores são definidos na aba IP Condition da janela de propriedades (consulte 2. Janelas de propriedades).