付録¶
この付録は、IPAnalyzer が 2 次元の回折画像(デバイ–シェラー環)を高精度な 1 次元プロファイルへ変換する際に用いている 幾何学とアルゴリズムの理論的背景 をまとめたものです。操作手順や各機能の使い方は本編(0. 概要・4. 実際の手順 など)を参照してください。ここでは、その背後にある座標系の定義・座標変換・パラメータ決定法・積算アルゴリズムを数式とともに説明します。
内容は、配布パッケージに同梱されている旧資料 doc/IPAnalyzerAlgorithm.pdf と現行の実装に基づいています。
付録の構成¶
- A1. 検出器の幾何と座標変換 — 右手系座標の定義、IP の傾き(\(\varphi,\ \tau\))を表す回転行列、画素形状(\(\mathrm{PixSizeX},\ \mathrm{PixSizeY},\ \xi\))の補正。
- A2. パラメータの決定 — スタンダード物質を用いた、カメラ長・波長・画素サイズ・IP 傾きの校正法(2 距離法、2 線法、楕円フィット)。
- A3. 画像の積算 — 画素強度を角度ステップへ配分する面積分配アルゴリズム。
- A4. 対称性情報 — 標準結晶の空間群対称性・幾何計算・ワイコフ位置・反射条件・対称要素図(Crystal ウィンドウのサブウィンドウ)。
- A5. 散乱因子 — 標準結晶の構造因子と反射一覧(X 線・電子線・中性子線)(Crystal ウィンドウのサブウィンドウ)。
座標系(共通の参照図)¶
以降の各ページは、次の座標系を共通の前提とします。原点は IP 上のダイレクトスポット(ビームが IP と交わる点)、\(Z\) 軸はビーム進行方向、サンプルは \((0,\ 0,\ -\mathrm{CL})\) に位置します。
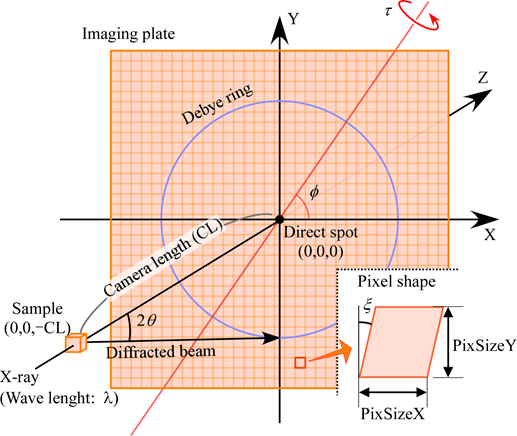
おもなパラメータ¶
| 記号 | 名称 | 意味 |
|---|---|---|
| \(\lambda\) | 波長 (Wave Length) | 線源の波長。特性 X 線では既知、放射光ではモノクロメータ位置で変わるため都度決定する。 |
| \(\mathrm{CL}\) | カメラ長 (Camera Length) | サンプルと原点(ダイレクトスポット)との距離。サンプル位置 \((0,0,-\mathrm{CL})\)。 |
| \(\varphi,\ \tau\) | 傾き (Tilt Correction) | IP の光軸(\(Z\) 軸)に対する傾き。\(\varphi\) は XY 平面内の傾き軸の方位、\(\tau\) はその軸まわりの回転角。 |
| \(\mathrm{PixSizeX},\ \mathrm{PixSizeY},\ \xi\) | 画素形状 (Pixel Size) | 画素を平行四辺形として表す。\(\xi\) は読み取りレーザーのスキャン開始点のずれ(歪み角)。 |
これらの値は、プロパティウィンドウの IP Condition タブで設定します(2. プロパティウィンドウ を参照)。