螢幕截圖為英文
IPAnalyzer 的介面目前僅在地化為英文與日文,因此本頁的螢幕截圖以英文顯示,即使內文已翻譯。
附錄¶
本附錄彙整 IPAnalyzer 在將二維繞射影像(Debye–Scherrer 環)轉換為高精度一維曲線時所使用的幾何與演算法的理論背景。關於操作步驟與各功能的使用方式,請參閱主手冊(0. 概觀、4. 操作步驟 等)。在此,我們以方程式說明其背後的座標系定義、座標轉換、參數決定方法以及積分演算法。
內容係根據隨發行套件附帶的舊版文件 doc/IPAnalyzerAlgorithm.pdf 以及目前的實作。
附錄的結構¶
- A1. 偵測器幾何與座標轉換 — 右手座標系的定義、描述 IP 傾斜 (\(\varphi,\ \tau\)) 的旋轉矩陣,以及像素形狀的修正 (\(\mathrm{PixSizeX},\ \mathrm{PixSizeY},\ \xi\))。
- A2. 參數決定 — 使用標準物質校正相機長度、波長、像素尺寸與 IP 傾斜(雙距離法、雙線法、橢圓擬合)。
- A3. 影像積分 — 將像素強度分配至各角度步階的面積分割演算法。
- A4. 對稱性資訊 — 標準晶體的空間群對稱性、幾何計算、Wyckoff 位置、反射條件,以及對稱元素圖(Crystal 視窗的子視窗)。
- A5. 散射因子 — 標準晶體的結構因子與反射清單(X 射線、電子、中子)(Crystal 視窗的子視窗)。
座標系(共通參考圖)¶
以下各頁均以相同的座標系作為共通前提。原點為 IP 上的直射斑點(束流與 IP 相交之點),\(Z\) 軸為束流傳播方向,試樣位於 \((0,\ 0,\ -\mathrm{CL})\)。
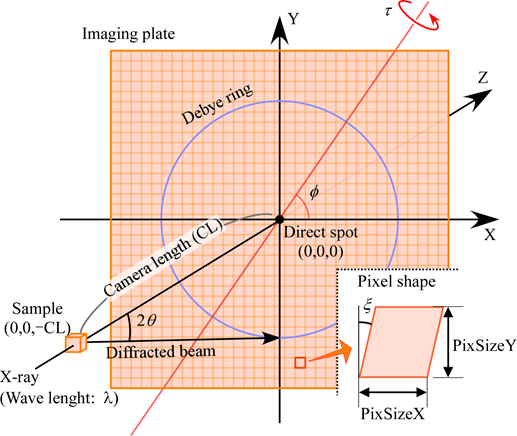
主要參數¶
| Symbol | Name | 意義 |
|---|---|---|
| \(\lambda\) | Wave Length | 光源的波長。對特性 X 射線為已知;對同步輻射則隨單光器位置而變化,必須每次決定。 |
| \(\mathrm{CL}\) | Camera Length | 試樣與原點(直射斑點)之間的距離。試樣位置為 \((0,0,-\mathrm{CL})\)。 |
| \(\varphi,\ \tau\) | Tilt Correction | IP 相對於光軸(\(Z\) 軸)的傾斜。\(\varphi\) 為傾斜軸在 XY 平面內的方位角,\(\tau\) 為繞該軸的旋轉角。 |
| \(\mathrm{PixSizeX},\ \mathrm{PixSizeY},\ \xi\) | Pixel Size | 將像素表示為平行四邊形。\(\xi\) 為讀取雷射掃描起點的偏移(畸變角)。 |
這些數值於屬性視窗的 IP Condition 分頁中設定(參閱 2. 屬性視窗)。